3Dスキャナーおすすめ5選|用途別の選び方と比較
3Dスキャナーは、実物の表面形状を点群として取り込み、ソフトで位置合わせや穴埋めをして3Dデータに仕上げる道具です。
光学式やレーザー式、広範囲向けのToFまで方式ごとに得意分野がはっきり違うので、最初に全体像をつかむだけで機種選びの迷いは減ります。
筆者の現場感として、同じ対象でも必要精度を0.1mmで求めるのか、1mmで十分なのかで選ぶ機種はガラッと変わります。
この記事では、その前提を踏まえて対象サイズ、必要精度、表面材質、持ち運び性、後処理環境という5つの確認ポイントを具体化しながら、用途別におすすめしやすい5機種を絞り込みます。
あわせて、フォトグラメトリを選ぶべき場面、CloudCompareやMeshLabのような後処理ソフトの考え方、STL・OBJ・FBX/GLTFの使い分け、透明物や黒色物で失敗しやすいポイントまで整理します。
読み終えるころには、自分に必要なのがハンディ型なのか、iPad ProのLiDARで足りるのか、あるいはLeica BLK360のような広範囲向け機まで視野に入れるべきかが判断でき、迷ったらこれという着地点まで見えてきます。
3Dスキャナーでできること|実物から3Dデータ化する流れ
3Dスキャナーがやっていることを一言でいえば、実物の表面を三次元座標として読み取り、あとから扱える3Dデータに整える作業です。
内部構造を透視する装置ではなく、まず取得するのは「表面の位置情報」です。
そこから点の集合である点群になり、面を張ったメッシュになり、必要に応じて寸法編集できるCADモデルや、色付きのビジュアルモデルへ発展していきます。
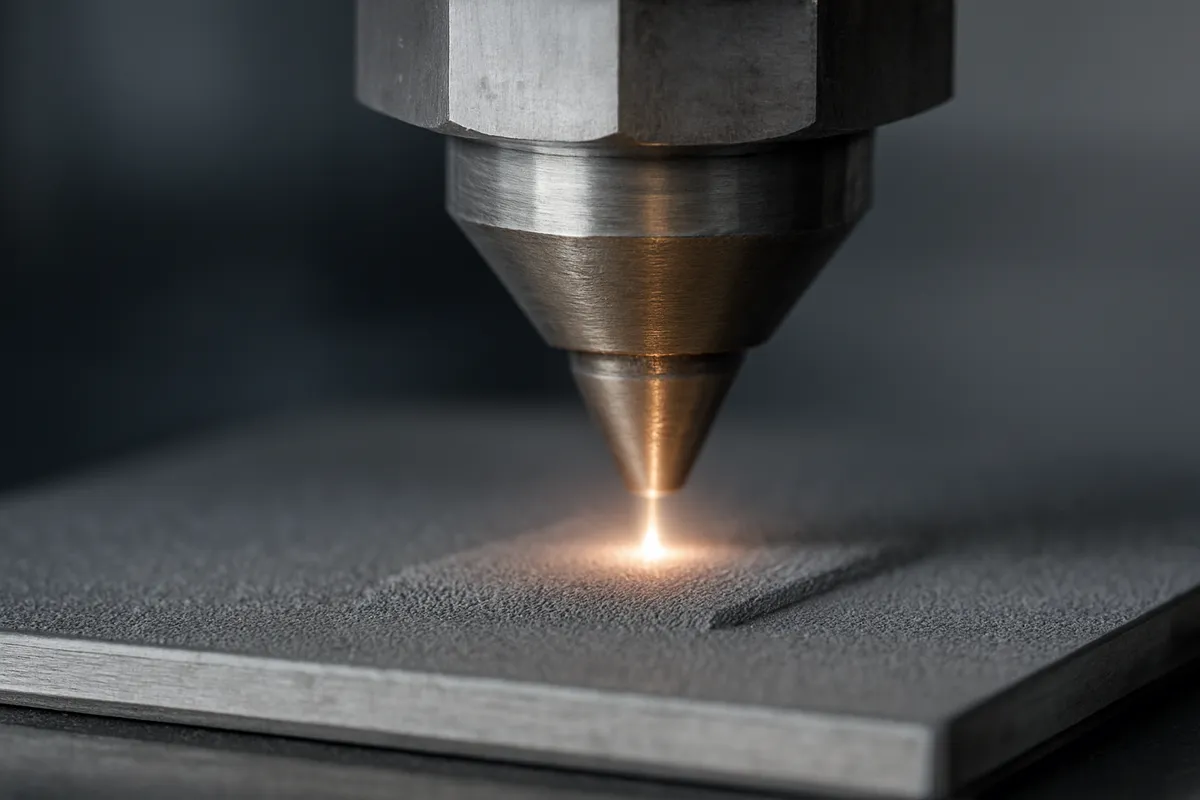
実務でよく使われるのは非接触式で、光の縞を投影して形状を読む構造化光、レーザー線やレーザーポイントで距離を測るレーザー方式、光が往復する時間から距離を出すToF(Time of Flight)が代表です。
広い空間を歩きながら自己位置を推定してつなぐSLAMや、複数写真から形を復元するフォトグラメトリも、用途によっては3Dスキャンの補完としてよく並べて検討されます。
点群→メッシュ→3Dモデルの基本
最初の成果物は、たいてい点群です。
これは物体表面上の無数の点にX・Y・Z座標を持たせたデータで、PLYやE57のような形式で扱われます。
点群の段階では、形の輪郭は見えても「面」としてはまだ扱いにくく、3DプリントやCG制作にそのまま回しにくい場面が多いです。
そこで点同士をつないで三角形の集合にしたメッシュへ変換します。
ここで使われる定番がSTLで、色や質感を無視して形状だけを出したい場面に向きます。
見た目まで持たせたいなら、OBJやGLTFのように形状とテクスチャを持てる形式が中心になります。
変換の流れをシンプルに書くと、実物をスキャンして点群を取得し、その点群を位置合わせして不要な点を落とし、面を生成してメッシュ化し、必要なら色や材質を貼る、という順番です。
記事中の図にするなら、実物 → 点群(PLY) → メッシュ(STL) → テクスチャ付きモデル(OBJ/GLTF)と並べると理解しやすいのが利点です。
この工程で効いてくるのが後処理です。
位置合わせ、ノイズ除去、穴埋め、法線の補正、リメッシュといった地味な作業が、データの実用性を大きく左右します。
筆者の感覚でも、点群からメッシュにリメッシュした瞬間に「触れるデータ」になるんです。
ノイズ除去と穴埋めで見違えるのを初めて体験すると、あの変化は気持ちいいです。
逆にいえば、スキャン直後の生データだけで完成と考えると失敗しやすい、ということでもあります。
接触式と非接触式の違いも、ここで整理しておくと混乱しません。
接触式はプローブが対象に触れて座標を取る方式で、高精度な寸法取りに強い一方、速度や扱える形状に制約があります。
いま読者が比較しているような3Dスキャナーの中心は非接触式で、ハンディ型の多くは構造化光かレーザーです。
たとえばRevopoint POP 3はハンドヘルド前提の小型機で、動作距離は約150〜400mm、シングルフレーム精度は最大0.05mm、最大18FPSという設計です。
小物をぐるっと回して形状を取るような使い方と相性がよく、感覚的には手元の部品やフィギュアを短時間で形にする方向の機械です。
対してLeica BLK360のような地上型レーザースキャナーは、建物や室内空間を点群化するための機材で、座標精度6mm@10m、G2では約68万点/秒というクラスです。
同じ「3Dスキャン」でも、狙っているサイズ帯がまったく違います。
用途をサイズと精度で分けると整理しやすいのが利点です。
手のひらサイズの部品や試作品を複製したいなら、ハンディ型の非接触スキャナーが中心になります。
部品寸法を見ながらCAD化したいリバースエンジニアリングでは、形状の滑らかさよりエッジや穴位置が欠かせません。
品質検査では、スキャンデータをCADの正解形状と重ねて差分を見るため、点群の密度より再現性が問われます。
文化財保存では寸法だけでなく質感も価値になるので、形状は3Dスキャン、色はフォトグラメトリや高解像度写真で補う構成がよく使われます。
ここで同じ機材を万能視しないことが大切で、小物向けと広域向けは役割分担がはっきりしています。
💡 Tip
点群処理の入口としてはCloudCompare、メッシュ補完にはMeshLabという組み合わせがわかりやすいのが利点です。自動化や大量処理まで踏み込むならOpen3Dのようなコードベースの選択肢が効いてきます。
3Dプリンターとの関係と違い
3Dスキャナーと3Dプリンターは混同されやすいですが、役割はきれいに分かれています。
3Dスキャナーは入力側で、現物をデータに変える装置です。
3Dプリンターは出力側で、データを現物に戻す装置です。
スキャナーが「現実からデジタルへ」、プリンターが「デジタルから現実へ」と考えると整理しやすいのが利点です。
ワークフローとしては、実物をスキャンして点群を取り、後処理してメッシュ化し、必要ならCADで寸法や形状を修正し、STLとしてスライスして3Dプリントする流れになります。
図にするなら、実物 → スキャン → 点群 → メッシュ → 修正 → STL → スライス → プリントです。
この一連の流れが強いのは、既製品の治具合わせ、破損部品の復元、手加工した原型の複製です。
筆者は3Dプリンター側の調整を日常的に触っていますが、スキャンデータがきれいに閉じたメッシュになっているだけで、その後のスライサー作業は楽になります。
逆に穴だらけのSTLや法線が乱れたメッシュは、プリンターの問題に見えて実は入力データ側が原因、ということが珍しくありません。
ファイル形式の役割分担もここで押さえておきたいところです。
3Dプリント前提ならSTLが基本です。
色や質感は持てない代わりに、多くのスライサーがそのまま扱えます。
OBJはテクスチャ込みでモデルを持ちたいときに便利で、外観確認やビジュアル用途に向きます。
FBXやGLTFはゲーム、VFX、Web/XRの文脈で強く、アニメーションやマテリアル込みの資産として扱いやすい形式です。
Adobeの3Dファイル形式の整理も、この使い分けを明快に説明しています。
スキャナーとプリンターが相互補完になる典型例は、既存部品の再製作です。
たとえば割れてしまった樹脂カバーの片側だけが残っている場合、まず残骸をスキャンして左右対称で補い、メッシュをCADに起こして取り付け部だけ寸法を追い込み、プリントで試作します。
スキャンだけでは寸法公差の詰めが足りず、プリントだけでは元形状がわからない。
両者をつなぐと、現場の再現スピードが一気に上がります。
一方で、3Dスキャナーは万能な入力装置ではありません。
透明、鏡面、黒色、深い穴の底面が苦手なのは、光を当てて戻り方を見る方式が主流だからです。
ここはプリンターとの違いでもあり、プリンターが内部形状まで積層できるのに対して、スキャナーは見えている表面しか拾えません。
だからこそ、スキャンしただけで完全な設計データになるとは限らず、あとで人が意味のある面や寸法に再構成する工程が必要になります。
リバースエンジニアリングの位置づけ
リバースエンジニアリングは、スキャンした形状をそのまま保存するだけでなく、設計に使えるデータへ再構成する作業です。
ここが単純な複製と分かれる判断材料になります。
複製なら外形を近い形でメッシュ化すれば足りる場面がありますが、リバースエンジニアリングでは、平面は平面として、円筒は円筒として、穴中心や基準面を持つCADデータに落とし込む必要があります。
要するに「似ている形」ではなく、「寸法と拘束で扱える形」へ変える工程です。
この作業が必要になるのは、古い設備の補修部品、図面が残っていない治具、手加工で作られた現物の再設計などです。
スキャンした点群やメッシュは現物理解の土台になりますが、そのままでは編集や公差管理に弱いです。
そこで断面を見ながら基準を立て、円や平面をフィッティングし、パラメトリックなCADモデルへ置き換えていきます。
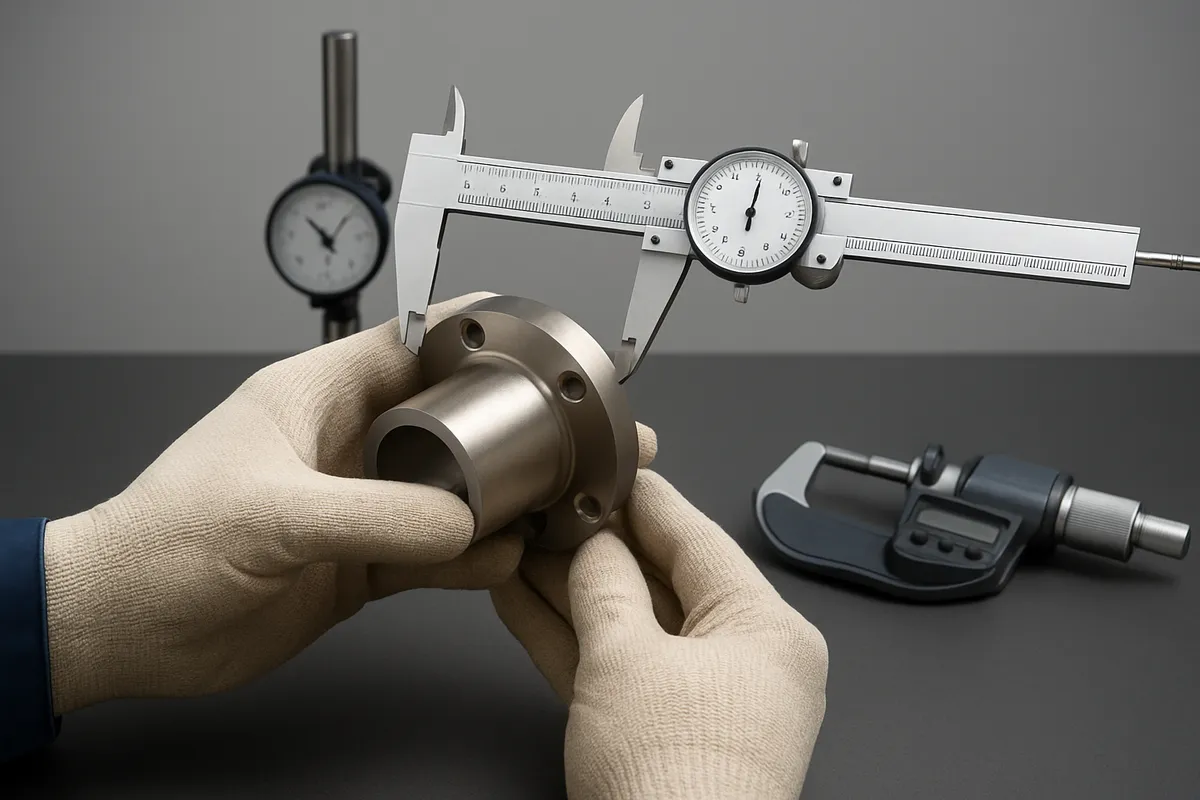
工場の検査でも同じ考え方があり、スキャンは「測る」役目、設計や判定は「比較する」役目です。
非接触スキャナーの方式ごとの位置づけも、リバースエンジニアリングで見るとわかりやすいのが利点です。
構造化光やレーザーのハンディ型は、小〜中型部品の外形取得に向きます。
広い空間や建築ではToF系が強く、Leica BLK360のようなTLSは室内や設備配置の現況記録に使いやすいのが利点です。
BLK360は本体約1kgで持ち運びやすく、フルスキャンを短時間で回せるため、複数地点をつないで空間全体を押さえる用途に向いています。
逆に、手のひらサイズ部品の穴位置を詰める仕事をBLK360でやるものではありません。
ここを混同しないだけで、機材選定の精度は上がります。
フォトグラメトリの位置づけも補助線として欠かせません。
フォトグラメトリは、複数枚の写真から特徴点を対応づけて三次元化する手法で、カメラ主体で始めやすく、色や質感の再現に強いです。
大型物や文化財で、表面の見た目まで残したいときに効きます。
一方、均一な面や特徴が少ない形状では合わせ込みが苦しく、寸法基準の取り方も3Dスキャナーほど安定しません。
Artec 3Dのフォトグラメトリ比較でも、両者は代替というより使い分け、あるいは併用で考えるのが自然です。
文化財分野で形状をスキャンし、質感を写真側で補う構成が多いのはそのためです。
実務では、スキャンの前段でキャリブレーションを行い、必要に応じてマーカーを貼ってトラッキングを安定させます。
ハンディ型ではマーカーが常時4〜6点見える配置が扱いやすく、ランダムに散らすほうが追従しやすい場面が多いです。
こうした準備は派手ではありませんが、後段の位置合わせ精度と作業時間に直結します。
リバースエンジニアリングはソフト上の再構成が本体と思われがちですが、実際にはスキャン時点で後工程の難しさが決まっています。
ここは3Dプリンターの失敗がスライサー設定だけでなく、元モデルの作り方に左右されるのとよく似ています。
3Dスキャナー選びで最初に見るべき5項目

おすすめ機種を見る前に、まず切り分けたいのは「何を、どこまで、どんな場所で、どの形式まで持っていきたいか」です。
3Dスキャナーは名前が同じでも、手のひらサイズの部品を狙う機材と、建物や屋外構造物を押さえる機材では設計思想がまったく違います。
筆者はプリンター側の再現性まで見て判断することが多いのですが、ここを曖昧にしたまま選ぶと、スキャン自体はできても後工程で詰みやすいのが利点です。
比較の起点としては、ハンディ型は小〜中型物の近接取得、デスクトップ型は小物の安定取得、工業用高精度機は寸法追い込み、ToF/TLSは建物や広範囲、フォトグラメトリは質感補完や大型物の低コスト取得という位置づけで考えると整理しやすいのが利点です。
| 比較軸 | ハンディ | デスクトップ | 工業用高精度 | ToF/TLS | フォトグラメトリ補完 |
|---|---|---|---|---|---|
| 主な対象サイズ | 小物〜中型 | 小物中心 | 小物〜中型部品 | 大型空間・建物・構造物 | 中型〜大型、外観記録 |
| 強み | 現場で回しやすい | 姿勢が安定しやすい | 寸法再現を詰めやすい | 広範囲を短時間で押さえやすい | 色や質感を残しやすい |
| 主な用途 | 複製、人物、部品形状 | フィギュア、小型部品 | 検査、治具、リバース | 現況記録、設備、建築 | 文化財、外観、背景資産 |
| 苦手分野 | 長時間保持、難材質 | 大物、現場作業 | 導入規模が大きい | 小部品の細密形状 | 寸法基準の厳密化 |
- 対象サイズ
最初に見るべきなのは、対象物のサイズ帯です。
小物、中型、大型、屋外構造物で、向く方式も必要な機材規模も変わります。
ここを外すと、精度表記だけ見ても判断を誤ります。
小物なら、作業距離が短く、対象をしっかり捉えやすいハンディ型やデスクトップ型が中心になります。
たとえばRevopoint POP 3は動作距離が約150〜400mmで、手元の部品や小型オブジェクトを近接で取りたい文脈に合います。
重量も約190gなので、軽快に取り回しやすい部類です。
小物を何度も回しながら面を拾うなら、デスクトップ型のように対象を安定して置ける構成も強いです。
特に左右対称でトラッキングが飛びやすい形は、持って振る機材より、固定系のほうが歩留まりが上がりやすいのが利点です。
中型になると、ハンディ型の使い勝手が生きてきます。
人物、バンパー、椅子、カウルのように、対象の周りを歩きながら取りたいものはハンディ向きです。
ただし、ここで重量の見え方が変わります。
570gクラスのハンディは1セッション15分を超えると手首に来るんですよね。
重量とバランスはスペック表の数字以上に効きます。
カタログ上は「軽量」に見えても、前荷重の強い機材は連続作業で疲れやすいのが利点です。
現場で何回も取り回すなら、純粋な重量だけでなく、持ち手の形状や重心も見ておきたいところです。
大型や屋外構造物まで入ると、話は一段変わります。
建物、工場設備、橋梁まわり、広い室内の現況記録は、ハンディよりToF系やTLSの守備範囲です。
Leica BLK360のような地上型レーザースキャナーは本体約1kgで、空間全体の点群取得に向きます。
建築・設備のように「広さを押さえる」用途では、手元の部品向け機とは比較軸そのものが違います。
iPad ProのLiDARも空間のあたり取りには便利ですが、これは簡易現況把握の方向で考えるべきで、小型部品の寸法再現を担う役ではありません。
- 必要精度
次に切るべきなのが、見た目重視なのか、複製重視なのか、検査重視なのかです。
同じ3Dデータ化でも、要求精度は違います。
ここを曖昧にすると、必要以上に高価な機材へ寄るか、逆に足りない機材を選びます。
見た目重視なら、形状の破綻が少なく、全体の雰囲気が再現できれば成立する場面が多いです。
フィギュア、人物、展示物、ビジュアル用途のアセット化では、寸法公差より表面のつながりやテクスチャの見え方が重要になります。
この領域では、OBJやGLTFまで含めて扱いやすいワークフローのほうが効きます。
フォトグラメトリを補完的に使う価値が高いのもここです。
たとえば SIMSCAN 系で見かける 0.020mm級と、POP 3 の最大 0.05mm は、どちらも細かい数字ですが、比較時には「最高精度」「シングルフレーム精度」「体積精度」「ポイント解像度」が混在しやすいのが利点です。
ここで挙げた数値はいずれもメーカー公称の計測条件に依存するため、用途に当てはめる際は「どの条件での数値か」を確認してから判断してください。
検査重視では、さらに基準が厳しくなります。
寸法検査や比較測定まで踏み込むと、工業用高精度機の領域に入ります。
一方、建築や設備の現況記録では、TLSのように広範囲を押さえる方式で±1mm級の高精度例が語られることもありますが、これは手のひらサイズ部品の穴位置を詰める精度とは別軸です。
空間全体では実用十分でも、小部品の複製にそのまま置き換える話ではありません。
逆に室内や構造物の把握なら、数十ミクロン級の数字は過剰です。
要求精度は対象サイズとセットで決まります。
- 表面材質と環境光
3Dスキャンでつまずきやすいのが、材質と光です。
黒、光沢、透明は定番の難物で、そこに暗所や直射日光が重なると歩留まりが落ちます。
機種選びの前に、対象に難条件が含まれるかを見ておくと、実運用のイメージが具体化します。
黒い樹脂は光を返しにくく、鏡面は反射が暴れ、透明体はそもそも表面認識が不安定になりやすいのが利点です。
PETボトル、磨かれた金属、黒いゴム、クリアパーツは、どれも「スキャンできるか」ではなく「そのままではきれいに取り切りにくい」と考えたほうが実態に近いです。
深い穴や入り組んだ底面も同様で、見えていない面は拾えません。
対策としては、反射を落ち着かせるスキャンスプレー、偏光を使った反射抑制、撮影角度の分割が基本になります。
特に光沢面は、機材を変えるだけで解決するより、前処理で素直な表面に寄せたほうが結果が安定します。
フォトグラメトリを併用して質感を別取りする構成も、この難所で効きます。
文化財や意匠物で、形状はスキャナー、見た目は写真という分担が使われる理由はここです。
環境光も無視できません。
室内の落ち着いた光では追従していたのに、窓際や屋外で急に荒れることがあります。
直射日光が強い場面では、光学式ハンディは不利です。
逆に、暗所すぎても位置合わせの手掛かりが減る場面があります。
屋外構造物や広い現場では、機材側の方式をToF/TLS寄りにするほうが筋が通ります。
ここを材質だけで判断せず、材質と環境光をセットで考えるのが判断材料になります。
- 持ち運び性・運用
運用面では、重量、電源、設置性、現場の足場まで含めて見ます。
ハンディは現場作業性、デスクトップは小物の安定性に強みがあり、どちらが上というより仕事の流れに合うかで決まります。
ハンディ型の魅力は、対象の周りを回りながらその場で取れることです。
人物や大型部品、固定物には圧倒的にやりやすいのが利点です。
POP 3のように約190gクラスだと、持った瞬間の負担は小さいです。
一方で、工業寄りの高性能ハンディになると、数字上は1kg未満でも、実際の疲労は別問題です。
センサー部が前に出ている機材は、短時間では気にならなくても、同じ姿勢を続けると手首と肘に効きます。
筆者はプリンターのメンテでも工具の重心差を強く感じますが、スキャナーもまったく同じで、運用のしやすさはスペック表だけでは読み切れません。
デスクトップ型は、持ち運んで現場で使う道具というより、作業机で小物を安定して取る道具です。
ターンテーブルや固定治具と相性がよく、同じサイズの対象を繰り返し扱うなら効率が出ます。
逆に、大きい対象や現場据え付け品では自由度が足りません。
電源も実務差が出る部分です。
USB給電前提なのか、モバイル端末で完結するのか、AC電源やノートPCを前提にするのかで、現場の機動力は変わります。
iPad ProのLiDARは持ち出しやすさが抜群ですが、用途は空間のラフな取得寄りです。
TLSは本体が持ち運べても、三脚設置、設置点の計画、データ回収まで含めて「持って歩ける=気軽」ではありません。
屋外や工場内では、通路幅、振動、粉じん、設置時間まで見たほうが実感に合います。
- 後処理ソフト/PC要件
3Dスキャナーは、本体だけで完結する道具ではありません。
スキャン後には位置合わせ、ノイズ除去、穴埋め、メッシュ化が入り、ここでPC性能とソフトの相性が効きます。
むしろ、選定の成否は後処理側で決まることが珍しくありません。
まず見ておきたいのは、同梱ソフトが何をどこまで担うかです。
Revopoint POP 3ならRevo Scanがあり、Windows、macOS、iOS、Androidに対応しています。
BLK360系はCyclone FIELD 360やCyclone REGISTER 360の流れに乗せる設計です。
ここで重要なのは、スキャン自体ができるかより、欲しい最終形式まで素直に出せるかです。
3Dプリント中心ならSTL、見た目やテクスチャ込みならOBJ、ゲームやXRならFBX/GLTFが扱いやすいのが利点です。
Adobeの3Dファイル形式の違いの整理でも、この棲み分けは明快です。
PC要件では、GPU、メモリ、保存容量が重くなりやすいのが利点です。
特に点群や高密度メッシュを何スキャン分も抱えると、スキャン本体よりPC側がボトルネックになります。
メーカー純正ソフトで前処理し、その後にCloudCompareで点群確認、MeshLabでメッシュ補完という流れは組みやすいのが利点です。
自動化や大量処理まで含めるならOpen3Dのような選択肢もあります。
CloudCompareは導入しやすい反面、単独で全部完結させるというより、他のツールと役割分担する感覚で使うと収まりがいいです。
ソフト面では、対応フォーマットの違いがそのまま後工程の手間になります。
E57やPTSが必要な現場系ワークフローもあれば、STLだけ出れば十分なプリント用途もあります。
本体スペックに目が行きがちですが、後処理ソフトのUI、位置合わせの安定性、エクスポート形式の素直さのほうが、日々のストレス差は大きいです。
ここが噛み合っていれば、多少スキャンに癖があっても運用で吸収しやすいのが利点です。
逆にソフトが弱いと、良い生データを取れても実務では詰まります。
3Dスキャナーおすすめ5選
用途ごとに候補を切るなら、「小物を手早く形にしたい」「部品計測まで踏み込みたい」「建物や設備を丸ごと押さえたい」で選ぶ機種がはっきり分かれます。
ここでは、同じフォーマットで5機種を並べます。
なお、工業機はマーカー運用と速度のバランスが実務効率を大きく左右します。
SIMSCAN-Eのような数百万点/秒級は大面積での“待ち”が減り、1スキャンごとのテンポが明らかに軽くなります。
エントリー|Revopoint POP 3
Revopoint POP 3は、初めての専用3Dスキャナーとして扱いやすい小型ハンドヘルド機です。
得意なのは、小物、フィギュア、手のひらサイズの部品、顔まわりの形状取りといった一般用途です。
動作距離が約150〜400mmなので、対象にしっかり寄って使う前提の機材だと考えると収まりがいいです。
確認できた数値は、シングルフレーム精度が最大0.05mm、最小ポイント間隔が0.05mm、最大18FPS、本体重量が約190gです。
数字の並びを見ると、細かい小物を近距離で追いかける設計がよく分かります。
190gという軽さは、ハンドヘルド機として気楽な部類で、スマホに近い感覚で持ち回せます。
筆者の印象でも、この重さなら数十秒単位のスキャンを繰り返しても負担感は小さめです。
小物なら一周しながら主要形状を取る作業が比較的短時間でまとまりやすく、STLやOBJ、PLY系の後工程にもつなげやすいのが利点です。
ソフトはRevo Scanで、Windows、macOS、iOS、Androidに対応しています。
価格は、公式ストアで具体金額の確認が取れなかったため、ここでは明示しません。
販路としてはRevopoint Japan公式ストアがあり、製品ページは です。
Amazonや楽天でも流通状況は変わるので、実売は販売ページごとの差が出やすいクラスです。
記事実装時の product_links は、Amazon、楽天、公式の3系統で付ける構成が相性いいでしょう。
向いている人は、まず専用機を使ってみたい人、3Dプリント用の元データを作りたい人、部品やホビー用途を中心に扱う人です。
向かない人は、広い空間を短時間で押さえたい人、検査用途で工業計測クラスの厳しさを求める人、大型ワークをどんどん回したい人です。

POP 3 Plus 3Dスキャナー:鮮明な色彩を再現 ― Revopoint
Revpoint POP 3 Plus 3Dスキャナーにより、中型の物体や顔の3Dスキャンをフルカラーで正確に作成できます。
www.revopoint3d.jpハイブリッド|SHINING 3D EinScan Pro HD
SHINING 3D EinScan Pro HDは、ハンドヘルド運用と据え置き寄りの使い分けをしやすいハイブリッド機として見やすいモデルです。
得意なのは、中小型部品、人物、意匠物、リバースエンジニアリング寄りの形状取得です。
1台で用途を広げやすいのが強みで、現場で手持ちしたい場面と、机上で安定して取りたい場面の両方をカバーしやすいのが利点です。
確認できた数値として、ハンドヘルドモードでの最小ポイント解像度は0.2mmです。
加えて、マーカー運用では常時4〜6点の視認が目安になります。
この4〜6点という条件は、実際欠かせません。
追従が安定する代わりに、対象や治具にマーカーをどう貼るかで作業感が変わります。
筆者はプリンターの位置合わせでも基準点の作り方が歩留まりに直結すると感じますが、EinScan Pro HDのような機種も同じで、スペックだけでなく運用設計が完成度を左右します。
細部を欲張りすぎるより、まず追従を安定させてから密度を詰めるほうが結果が整いやすいのが利点です。
価格帯は数十万円クラスで捉えるのが現実的です。
家庭用より一段上、工業用よりは導入しやすい中価格帯の代表格で、用途の広さに対して投資が素直に効きやすいポジションです。
公式URLは記事実装時に付与したいところですが、このタスクのデータシートにはURL確定値が含まれていないため、本文では製品名の明示にとどめます。
product_links はAmazon、楽天、公式の販売実在性を確認した上で生成する構成が適しています。
向いている人は、ホビー機から一段上に進みたい人、人物も部品も扱いたい人、机上作業と現場作業を1台で回したい人です。
向かない人は、数百万円クラスの検査機に近い精度と速度を求める人、逆に小物だけを安く気軽に取りたい人です。
工業高精度|SCANTECH SIMSCAN
SCANTECH SIMSCANは、工業用途での近接高精度スキャンを強く意識したモデルです。
得意なのは、機械部品、金型、治具、リバースエンジニアリング、検査前提の高密度取得です。
小型で取り回しやすい一方、狙っている世界は工業寄りです。
確認できた数値は、本体重量570g、最高公称精度0.020mm(注: メーカー公称の計測条件に依存)、スキャン速度は最大280万点/秒です。
この「最高公称精度」は条件により変化するため、検査用途で使う際はメーカーの精度定義と実測条件を照らし合わせてください。
価格帯は数百万円クラスです。
ここは一般向けの延長で考える製品ではなく、導入目的が明確な現場向けです。
公式URLは記事実装時にSCANTECH公式ページを付与する前提で、product_links も公式中心で構成するのが自然です。
Amazonや楽天で一般消費財のように買うカテゴリではありません。
向いている人は、部品形状の再現度を強く求める製造業、治具や既存部品のデータ化を業務で回す人、工業機らしい精度を携行性と両立したい人です。
向かない人は、ホビー用途の予算感で探している人、空間計測や建物記録を主目的にする人です。
高速モデル|SCANTECH SIMSCAN-E
SCANTECH SIMSCAN-Eは、SIMSCAN系の中でも速度を前面に出したモデルとして見ると分かりやすいのが利点です。
得意なのは、大面積部品、広めの対象の短時間取得、検査工程のスループット改善です。
高精度を維持しながら、よりテンポよく面を埋めていきたい現場に合います。
確認できた数値は、最高精度0.020mm、スキャン速度が最大630万点/秒です。
SIMSCANの最大280万点/秒と比べても、速度面の差は大きいです。
筆者が実務で強く感じるのは、こうした数百万点/秒級になると、大面積での“待ち”が減ることです。
単にカタログ値が大きいだけではなく、広い面をなぞるときのテンポが変わります。
マーカーを適切に置けている前提なら、面を拾い切るまでのストレスが明確に軽くなります。
検査や比較測定の前段で、まず全体形状を短時間で押さえたい場面では効き目が大きいです。
価格帯は、こちらも数百万円クラスです。
工業機の中でも高速性を価値に変えやすい現場向けで、1件ごとの取得時間短縮がそのまま生産性に乗る業務と相性がいいです。
公式URLと product_links はSCANTECH公式中心で付与するのが前提になります。
向いている人は、広めの対象を高精度のまま素早く取りたい人、複数案件を回す検査・計測現場、速度改善の費用対効果が見えやすい法人用途です。
向かない人は、単発の小物用途が中心の人、マーカー運用や工業ワークフローを組まない使い方を想定している人です。
大型・計測|Leica BLK360
Leica BLK360は、部品用の3Dスキャナーというより、建物、室内、設備、構造物の現況記録に使うTLS寄りの機材です。
得意なのは、屋内外空間の点群取得、BIM前提の現況把握、設備レイアウト確認、改修前の記録です。
小部品を精密に複製するための選択肢ではなく、空間を丸ごと測る道具として位置付けるとズレません。
確認できた数値は、座標精度が 6mm@10m(メーカー公称条件に依存)、本体重量が約1kg、寸法が高さ165mm・直径100mmです。
座標精度の表記は計測距離や環境条件に依存しますので、用途に応じた実運用での妥当性を必ず確認してください。
価格は本体販売価格がオープンで、代理店経由の見積中心です。
一方、国内では神戸清光のレンタル例として1週間350,000円(税込)からの事例があります。
TLS全体の導入帯としては140万円〜2,000万円規模の世界に入るので、BLK360もその文脈で捉えるのが自然です。
公式ページは https://leica-geosystems.com/ja-jp/products/laser-scanners/scanners/leica-blk360 です。
product_links は公式と国内代理店、必要に応じてレンタル窓口を入れる構成が実用的です。
向いている人は、建築、設備、施工、ファシリティ管理、改修前の現況記録を扱う人です。
向かない人は、机上の小物スキャンや3Dプリント用の細密複製を主目的にする人です。
6mm@10mという精度は空間記録では意味がありますが、部品のはめ合いを見る精度とは役割が違います。
家庭用・小規模用途ならフォトグラメトリとどちらを選ぶべきか

フォトグラメトリが向くケース
家庭用や小規模用途で迷ったとき、まず整理しやすい基準は「何を残したいのか」です。
形状の一致性を優先するのか、見た目の質感まで含めて残したいのかで、選ぶべき手段は変わります。
フォトグラメトリは、カメラやスマホから始めやすく、専用スキャナーを買わなくても導入しやすいのが最大の強みです。
初期費用を抑えやすいので、まず3D化を試したい人には入り口として優秀です。
もうひとつの長所は、テクスチャ再現の強さです。
人物、彫刻、フィギュア、建築外観、風景の一部のように、表面の色や模様が情報量そのものになっている対象では、フォトグラメトリの絵作りが効きます。
OBJやGLTFのようなテクスチャを持てる形式で扱うと、単なる形のコピーではなく「見た目ごと残す」方向に持っていきやすいのが利点です。
筆者の所感でも、人物や作品はフォトグラメトリのテクスチャが効くんですよね。
表面の陰影や塗装の雰囲気まで残ると、3Dプリント用の原型というより、アーカイブや鑑賞向けデータとしての満足度が上がります。
大型物との相性も見逃せません。
専用ハンディスキャナーは近接で小物から中型物を取るのが得意ですが、家具、バイク、庭石、建物の一部、屋外オブジェのようにスケールが大きくなると、写真を回り込みながら撮って組むフォトグラメトリのほうが取り回しやすい場面があります。
景観や背景資産づくりでも同じで、色の情報を活かしやすいぶん、見栄え重視の用途と噛み合います。
一方で短所ははっきりしています。
精度の安定が撮影条件に強く左右されることです。
ブレ、反射、影の強さ、撮り漏れ、似たような面が続く形状は結果にそのまま出ます。
しかも撮影後のワークフローは意外と重く、写真整理、位置合わせ、点群化、メッシュ化、穴埋め、不要部分の掃除まで含めると、手軽に見えて実作業は軽くありません。
3Dプリンターへそのまま投げられるSTLに仕上げるまでに、CloudCompareやMeshLabのような後処理系ツールを触る流れも珍しくないです。
導入コストは低めでも、作業時間コストは決して低くない、というのが実感に近いです。
3Dスキャナーが向くケース
3Dスキャナーが強いのは、形状の再現性を安定して取りたい場面です。
家庭用であっても、実用品の部品、割れた樹脂パーツ、既製品の当たり面、ネジ穴まわりの位置関係のように、見た目よりも形の整合性が重要な対象ではこちらが優位です。
前のセクションで触れたRevopoint POP 3のようなハンドヘルド機は、小物や手のひらサイズの部品を近接で取りやすく、3Dプリント前提の形状取りと相性がいいです。
フォトグラメトリとの違いは、撮影条件よりもセンサー側の計測に依存するぶん、結果のブレが読みやすいところです。
ワークフロー自体はどちらも後処理が必要ですが、3Dスキャナーは「同じ対象をもう一度取ったときの揃い方」が良いです。
割れたパーツの復元はスキャナーの一致性が安心です。
欠けた左右パーツを突き合わせたい、破断面から補修部品を起こしたい、といった用途では、色がきれいに残ることより、輪郭や基準面が素直に取れることの価値が上がります。
速度面も強みです。
専用機は対象をなぞりながら短時間で形を押さえやすく、作業テンポを作りやすいのが利点です。
工業寄りのSIMSCAN系が最大280万点/秒や最大630万点/秒というクラスまで上がるのは業務機の世界ですが、家庭用の文脈でも「写真を大量に撮って後で解く」より、「その場で面を埋める」感覚のほうが作業しやすい人は多いです。
もちろん弱点もあります。
専用機を買う前提になるので初期費用は上がりますし、透明、鏡面、黒色のような難物材質では工夫が必要です。
ここはフォトグラメトリでも得意とは言えませんが、3Dスキャナーは「万能に何でも即取れる道具」ではありません。
ただ、家庭用3Dプリンターとの組み合わせまで含めると、実用パーツ複製ではスキャナー優先の判断が合理的です。
FDMでも光造形でも、プリント後に削る、合わせる、組むという工程を考えると、見た目より形が安定しているほうが後工程が楽になります。
ℹ️ Note
鑑賞物や人物モデルはフォトグラメトリ併用が映えやすく、実用品や補修部品は3Dスキャナー中心のほうが仕上がりを詰めやすいのが利点です。家庭用3Dプリンターで何を出したいかが、選択基準として効きます。
なお、iPad ProのLiDARのような選択肢は、専用3Dスキャナーとフォトグラメトリの中間というより、メモ用途や粗形状の取得として捉えると収まりがいいです。
2020年以降のLiDAR搭載iPad Proで、約5mまでの室内や家具配置をざっくり押さえる使い方は便利ですが、部品複製の基準面取りや細部再現を任せる道具ではありません。
空間の当たりを取る、設置検討のために部屋を軽くメッシュ化する、といった使い方なら十分実用的です。
ハイブリッド運用の勘所

家庭用・小規模用途でいちばん失敗しにくいのは、実は二者択一で考えすぎないことです。
大型物、景観、人物、作品のように質感やスケール感が価値になる対象はフォトグラメトリが強く、部品寸法、取り付け位置、対称性、左右一致のように形の整合性が価値になる対象は3Dスキャナーが強いです。
この役割分担を押さえると、選択が楽になります。
実務上の勘所は、形状取得と見た目取得を分けることです。
たとえば小型オブジェや人物胸像なら、ベース形状をハンディスキャナーで押さえ、その上にフォトグラメトリ由来のテクスチャを載せる考え方が有効です。
逆に、割れた家電パーツや樹脂ブラケットの補修なら、テクスチャはほぼ不要なので、最初からスキャナー中心で進めたほうが速いです。
筆者は3Dプリント前提のデータづくりでは、見た目を盛る工程と、寸法を詰める工程を分けたほうが最終品質が安定すると感じます。
ファイル形式の使い分けもここに連動します。
3Dプリントへ直行するならSTL中心、色や質感を見せたいならOBJ、Web表示やXR寄りまで見据えるならGLTFやFBXが扱いやすいのが利点です。
フォトグラメトリはOBJ系との相性が良く、3Dスキャナーは最終的にSTLへ落とし込む流れが自然です。
どちらで取得するかだけでなく、何形式でゴールさせるかまで先に決めると、余計な後処理が減ります。
家庭用途では、専用スキャナーを1台持っておくと部品系は安定し、フォトグラメトリを併用すると作品系の表現力が伸びます。
逆に、人物や展示物を中心に扱うなら、まずはフォトグラメトリ主体で始めて、寸法が必要な対象が増えた段階でスキャナーを足す流れが自然です。
用途を「鑑賞物」と「実用パーツ」に分けて考えると、この線引きは明確になります。
スキャン後に必要な後処理|点群、メッシュ、穴埋め、書き出し形式
3Dスキャナーは、買ってそのまま完成データが出てくる道具ではありません。
実務の中心はむしろスキャン後にあって、基本の流れはノイズ除去→位置合わせ→メッシュ化→穴埋め・リメッシュ→単位とスケール確認です。
ここを雑に済ませると、見た目はそれっぽくても、3Dプリントで合わない、DCCで向きが崩れる、Web表示で重すぎる、といった問題が一気に出ます。
特にハンドヘルド機やLiDAR系は、生データの段階では不要点や薄い面、局所的な欠損が残りやすいので、後処理の手順まで含めて道具選びを考えたほうが収まりがいいです。
この工程は「高機能な万能ソフトを1本で回す」より、役割ごとに道具を分けたほうが速いです。
点群が重い状態でいきなり全部をやろうとすると、PC側の待ち時間が増えて判断も鈍ります。
実際、CloudCompareで点群を軽くしてからMeshLabで穴埋めに入る段取りにすると、PCが固まりにくく、作業全体のテンポが良くなります。
買った後に必要なのは、スキャナー本体だけでなく、この後処理の段取りです。
点群・メッシュ処理のツール選び
参照記事で確認した当時のバージョン表記は 2.12.4(確認: 2022/07/14)でした。
CloudCompare は頻繁に更新されるため、導入前には必ず公式サイトで最新版を確認してください(確認: 2026/03/15)。
また、本文の操作手順やメニュー名はバージョン差で変わることがある点を念頭に置いてください。
MeshLabは、CloudCompareの後を受ける形で使うと強みが出ます。
メッシュ化したあとの穴埋め、法線の整理、リメッシュ、軽い修復作業は実用的です。
UIは少しとっつきにくいですが、メッシュを触る段階に入ると手数が多く、スキャンデータの「あと一歩足りない」を埋めやすいのが利点です。
3Dプリント前に開口部を塞ぐ、薄い破片を消す、面の荒れを均すといった仕上げでは、CloudCompare単独よりMeshLabを挟んだほうが結果を詰めやすいのが利点です。
Open3Dは、手作業ツールというより自動化基盤として見ると分かりやすいのが利点です。
大量データの前処理を定型化したい、毎回同じ手順で点群を間引きたい、独自ワークフローに組み込みたいという場面で効きます。
コード前提なので初心者向けとは言いにくいですが、大容量データや繰り返し処理では強いです。
建築系の点群や複数案件をまとめて処理するような流れでは、Open3Dで整形してから必要に応じてMeshLabやDCCへ渡す構成が組みやすいのが利点です。
実際の使い分けを単純化すると、点群の整理はCloudCompare、メッシュ補完はMeshLab、自動化や大容量処理はOpen3Dです。
1本に全部を期待するより、この分担で考えたほうが失敗が少ないです。
3Dスキャンは取得精度だけで差がつくのではなく、後処理をどこまで短時間で安定化できるかで使い勝手が決まります。
💡 Tip
スキャン直後の生データは保存し、そのコピーに対して軽量化や穴埋めを進める運用だと戻り先が明確です。後処理は一発で正解を引くというより、段階を切って詰める作業です。
書き出し形式の選び方

書き出し形式は、何に使うデータかで決めるのが基本です。
形状だけを3Dプリントへ渡すならSTLが最も素直です。
STLは色や質感をほぼ持てませんが、スライサーに入れる最終データとしては扱いやすく、家庭用3Dプリンターの流れとも相性がいいです。
補修部品や治具のように、見た目より形状優先の用途ではSTL中心で問題ありません。
OBJは、見た目確認やテクスチャ付きモデルに向いています。
メッシュ形状に加えてマテリアルや画像参照を持たせやすいので、フォトグラメトリ併用や着色スキャンの受け皿として使いやすいのが利点です。
3Dプリント専用ならSTLのほうが軽快ですが、形と色を一緒に残したいならOBJのほうが自然です。
中間成果物としても扱いやすく、MeshLabや多くのDCCで開きやすいのも利点です。
PLYは、中間保存に便利です。
点群の属性や頂点色を持たせやすく、点群段階とメッシュ段階の橋渡しに向いています。
スキャン直後の情報量を比較的そのまま残しやすいので、後で別ツールに渡して再処理する前提ならPLYを持っておく価値があります。
特にCloudCompareやOpen3Dと相性が良く、後工程での自由度を残しやすいのが利点です。
GLTFは、Web表示やXR用途で強い形式です。
軽量に配布しやすく、ブラウザやリアルタイム表示に乗せやすいので、オンラインの3DビューアやAR確認に向きます。
見た目を含めて配りたいが、FBXほどDCC寄りにしたくないときにちょうどいいです。
社内確認用の3D資料やWeb埋め込みを考えるなら、最終形式としてGLTFは扱いやすいのが利点です。
FBXは、ゲーム、映像、DCCワークフロー向けです。
アニメーションやリグ、複数ツール間の受け渡しまで含めた運用では、今でもFBXが強いです。
Blender、Maya、Unity、Unreal Engine系の流れに乗せるなら候補に入りやすく、単なるスキャン保存より「編集前提の制作データ」という位置づけになります。
逆に、3Dプリントだけが目的ならFBXは少し大げさです。
用途差を整理すると、3DプリントはSTL、テクスチャ付きモデルはOBJ、点群や中間保持はPLY、Web/XRはGLTF、DCC制作はFBXという切り分けが実務では分かりやすいのが利点です。
これを曖昧にすると、途中で色情報が消えたり、面数が多すぎて扱いにくくなったりします。
保存ポリシーも欠かせません。
筆者は、中間成果はPLYやOBJで残し、最終納品や出力用はSTLやGLTFに分けて管理するやり方が安定すると感じます。
たとえば「scan_raw」「align_v1」「mesh_v2」「print_final」「web_final」のように段階を分けておくと、穴埋めをやり直したいときに最初から全部戻さずに済みます。
3Dスキャナーは取得した瞬間より、その後のデータ整備で完成度が決まる道具です。
後処理と保存形式まで設計してはじめて、買った価値がきちんと出ます。
失敗しやすい対象物とスキャンのコツ
難しい材質と環境の対策
3Dスキャンでつまずきやすい原因は、大きく分けると「光が素直に返ってこない材質」と「形状の基準が少ない対象」です。
典型例が、透明、鏡面、黒色、深い穴、均一形状、そして暗所や直射日光下です。
どれもセンサーが面を正しく認識しにくく、位置合わせが飛んだり、点が抜けたりします。
透明物や鏡面は、構造化光でもレーザーでも苦手です。
投影した光が透過したり、反射が暴れたりして、表面として読めなくなるからです。
黒色も同様で、特に黒つやのある樹脂部品は光を吸いやすく、しかも反射が不規則になりやすいので厄介です。
筆者も黒つやのプラ部品を扱ったとき、最初は本当に“映らない”感覚がありました。
ところがマットスプレーをひと吹きしただけで点が乗り始めて、そこから仕上がりが一気に安定しました。
この手の対象は、機材の性能差より前処理の有無が効く場面が多いです。
深い穴や細い溝も、初心者が見落としやすい難所です。
穴の入口までは取れても、内部の底面や側壁まで光が届かず、結果として浅く潰れたような形になりやすいのが利点です。
ここはスキャナーを正面から向けるだけでは足りません。
角度を振って斜めから複数回当てる、対象を持ち替える、治具で姿勢を変えるといった工夫が必要です。
均一形状の円筒や無地の箱も追従が不安定になりやすく、面が取れていても位置が迷子になることがあります。
環境側では、暗所と直射日光が典型的な敵です。
暗所ではカラートラッキングや視認性が落ち、対象との距離感を崩しやすくなります。
逆に屋外の直射日光は、投影パターンや赤外系の読み取りを潰しやすく、特にハンディ型では歩留まりが下がりやすいのが利点です。
室内なら拡散した照明を増やし、影を浅くするだけで安定することがあります。
鏡面や光沢面では偏光フィルタを組み合わせて反射を抑える考え方も有効です。
要は「見えない面を増やさない」「反射を暴れさせない」方向に寄せると成功率が上がります。
苦手傾向をざっくり整理すると、方式ごとの相性は次のように見ると分かりやすいのが利点です。
| 対象・環境 | ハンディ型3Dスキャナー | フォトグラメトリ | 地上型/ToFレーザースキャナー |
|---|---|---|---|
| 透明 | × | × | △ |
| 鏡面 | × | △ | △ |
| 黒色 | △ | △ | ○ |
| 屋外光 | △ | ○ | ○ |
この表は万能な優劣ではなく、苦手の出方を掴むための目安です。
たとえば屋外の大型構造物はToFやTLSが強い一方、手のひらサイズの透明パーツをきれいに取る話とは別です。
難物を相手にするときは、機種選び以上に、マット化、照明、角度の振り方で結果が変わります。
マーカー配置・キャリブレーション

トラッキングが飛ぶ原因は、設定より先に基準点不足であることが少なくありません。
とくに均一形状や特徴の少ない面では、マーカー運用が仕上がりを大きく左右します。
SHINING 3Dが示している目安では、常時4〜6点が見えている状態が安定しやすいのが利点です。
ここが2〜3点しか見えていないと、面は拾えていても姿勢推定が不安定になり、途中でズレやすくなります。
配置のコツは、ただ等間隔に並べることではありません。
規則正しく貼りすぎると、似た並びが連続して識別しにくくなることがあります。
実務では、少しランダム性を持たせながら、視野のどこを見ても複数点が入るように配置したほうが追従しやすいのが利点です。
対象物に直接貼れない場合は、治具や周囲の台紙にマーカーを散らして、スキャナーが常に位置の手掛かりを持てる状態を作ると安定します。
細部を攻める前に「追従を失わない舞台」を作ったほうが結果は速く整います。
この設定を変えた瞬間に世界が変わる、というタイプの改善点に近いです。
キャリブレーションも軽視しにくい要素です。
スキャンが妙に甘い、左右で面のつながりが悪い、平面がわずかに波打つといった症状は、操作ミスだけでなく校正状態のズレが絡むことがあります。
高精度機を精度前提で使うなら、定期的なキャリブレーションは運用の一部です。
工業寄りの高精度機では、年1回を目安に校正サイクルを回している現場も珍しくありません。
カタログ上の高精度を実務で再現するには、こうした基礎整備が前提になります。
ℹ️ Note
追従不良が出たときは、解像度や感度を触る前に、視野内のマーカー数と配置の偏りを見ると原因を切り分けやすいのが利点です。設定より基準点不足のほうが、初心者では頻出です。
屋外・大型スキャンの注意点
屋外や大型対象になると、近接ハンディ機の感覚をそのまま持ち込まないほうが整理しやすいのが利点です。
建物、設備、構造物のようなスケールでは、ToFやTLSのほうが役割に合っています。
たとえばLeica BLK360のような地上型レーザースキャナーは、空間全体の現況を短時間で押さえる方向の機材です。
広範囲を扱う文脈では、手元部品向けの0.05mm級や0.020mm級の話より、どの距離でどの程度の寸法再現を見込むかが重要になります。
ここで混乱しやすいのが、SLAM系や大型計測機の精度レンジです。
広域スキャンの世界では、±1mm級の高精度例がある一方で、20mm級の例も混在します。
どちらも「3Dスキャン」ですが、狙っている用途が違います。
改修前の建物記録や設備配置の把握なら十分実用でも、小型部品の穴位置再現とは評価軸が違います。
期待精度を先に決めずに機材だけ選ぶと、必要以上に高価な機材を選んだり、逆に精度不足にぶつかったりします。
屋外では直射日光への対策も欠かせません。
ハンディ型は投影光が負けやすく、白飛びやトラッキング不安定が起きやすいのが利点です。
日陰側から回る、曇天を選ぶ、対象の一部を基準面として押さえてから進めるといった段取りが効きます。
大型物でも、全面を一気に取ろうとするより、位置合わせしやすい単位に区切ったほうが後処理も楽です。
40〜120mの距離文脈を想定する機材がある一方で、iPad ProのLiDARは約5m以内が使いやすいレンジです。
同じ「空間を測る」でも、持ち込める距離感がまったく違います。
大型案件では、点群量そのものより「どこまでを正とするか」の設計が先に来ます。
建築現況なら柱芯や壁面の把握、設備なら干渉確認、屋外構造物なら配置関係の再現と、見るべき寸法が違うからです。
近接スキャンの延長で考えるより、用途に対して期待精度を設定し、そのレンジに合う方式を選ぶほうが失敗は少ないです。
迷ったらこれ|用途別の結論
部品復元
部品を起こすなら、優先順位は「見た目が似ていること」より一致性とエッジ再現です。
家庭用3Dプリンターで実用品を複製するとき、筆者の見立てでは効くのは測定値の細かさそのものより、基準面どうしが素直に合うことなんですよね。
実際、0.1〜0.2mm級で十分に成立する場面は多いです。
だから最初の1台としては、ハンディ型の中でも部品用途に寄せやすい中〜高精度モデルを選ぶのが堅実です。
候補として挙げやすいのはEinScan Pro HDのようなクラスです。
難しいのは、透明、黒、鏡面、均一形状のような“素直に追えない対象”です。
この系統は機材の格だけで押し切るより、マーカー運用やスプレー前提で考えたほうが成功率が上がります。
特に欠損部品の復元やはめ合い部の再現では、角の立ち方と穴位置まわりのつながりが甘いと後工程で苦しくなります。
部品復元を主目的にするなら、華やかなテクスチャ性能より、安定して同じ形を取り切れる機種を選ぶのが結論です。
人物/作品
人物や作品を残す用途では、形状だけでなくテクスチャの説得力が欠かせません。
肌、布、彩色、筆致のような情報は、点群やメッシュだけでは魅力が出切りません。
そのため、この用途はスキャナー単体で完結させるより、フォトグラメトリを併用するか、スキャナーで形を取りつつ写真をベイクする構成が扱いやすいのが利点です。
たとえば形状の安定感は専用スキャナーに任せ、見た目の情報は写真で補うと、人物像や作品の“らしさ”が出しやすくなります。
専用機で形を押さえ、OBJやGLTF系で質感付きモデルに持っていく流れは素直です。
人物は動きやすく、作品は展示環境の照明条件に左右されやすいので、短時間で形を確保して、質感は別工程で詰める考え方が噛み合います。
加えて、人物撮影では撮影許諾とプライバシー管理を先に整理しておくべきです。
この用途は技術選定だけでなく、運用設計まで含めて決まります。
建物/大型物
建物、設備、構造物のような大型対象では、近接ハンディ機を無理に使うよりToFやTLSを前提に選ぶほうが早いです。
候補としてはLeica BLK360のような地上型レーザースキャナーが分かりやすく、広い範囲を短時間で現況化する文脈に合います。
建築や大型物では、必要なのは手のひら部品の微細再現ではなく、距離レンジの中で破綻なく全体を押さえられることです。
ここで見るべき基準は、数十ミクロン級の細かい数字ではなく、±1mm〜数cmのどこが必要十分かです。
改修前の現況、設備干渉、配置確認なら、そのレンジで判断したほうが機材選定を間違えません。
屋外では光条件の影響も受けるので、日中運用を含めてレンジと方式を合わせる必要があります。
BLK360は空間全体を扱う道具として整理しやすく、部屋単位から建物外周まで「まず全体を正しく持ち帰る」用途に向いています。
文化財
文化財で優先すべきは、精度競争ではなく無接触・低侵襲です。
触れない、貼れない、塗れないという条件が入ることも多く、一般的な部品スキャンの発想をそのまま持ち込むと破綻します。
この領域では、スキャナー単体で完結させるより、スキャナーとフォトグラメトリのハイブリッドが収まりやすいのが利点です。
形状は専用機で安定して取り、色や質感は写真で補う構成なら、両立しやすいからです。
特に彩色面、風化した表面、細かな凹凸を含む対象では、形状だけだと記録として不足し、写真だけだと寸法の芯が弱くなります。
両者を組み合わせると、展示記録にも研究用途にも使いやすいデータに寄せやすいのが利点です。
文化財は「どこまで介入してよいか」が先にあり、その制約の中で最善の記録方法を組むのが本筋です。
機材の強さより、低侵襲で再撮しやすい運用のほうが価値になります。
予算重視

予算を抑えたいなら、いきなり高額機を買うよりサービス利用か、低価格帯スキャナーとフォトグラメトリの併用から入るのが合理的です。
使用頻度が低いのに専用機へ大きく投資すると、機材費より学習コストのほうが重く感じやすいのが利点です。
単発案件や年に数回の使用なら、外注やレンタルのほうが結果的に安くつくことも珍しくありません。
手元に置いて試行錯誤したいなら、軽量で扱いやすいRevopoint POP 3のような小型機から始める手はあります。
Revopoint POP 3は本体約190gで取り回しやすく、小物を短時間で形にしていく練習台として入りやすいのが利点です。
テクスチャや大型物まで一台で完璧にこなそうとせず、形状取得は専用機、見た目は写真という分担にすると、費用対効果が一気に良くなります。
まず最大サイズを測り、必要精度を3段階で定義し、材質の難所を洗い出してください。
そのうえでPCとソフト要件を試し、判断が割れるなら低リスクな導入から始めるのが失敗しにくい進め方です。
関連記事
3Dプリンターのランニングコストを実額で計算
3Dプリンターの維持費は、本体価格とは別に電気代・材料費・消耗品に分けて考えると、家庭用FDMなら月数百円から数千円に収まることが多いです。Ender 3からBambu Lab X1 Carbonまで複数機を常設運用してきた経験でも、購入前にいちばん不安だったのは毎月のランニングコストでしたが、
Bambu Lab比較|A1 mini・P1S・X1Cの違い
『Bambu Lab』の3機種は、どれを選んでも速いのに、置き場所と使う素材で満足度がきれいに分かれます。最初の1台をデスク脇に常設したいなら『A1 mini』、ABSやASAまで広げて実用品を回すなら『P1S』、夜間プリントでも失敗の見逃しを減らしたいならセンサーと監視機能が厚いX1Cが本命です。
3Dプリンター価格帯別おすすめ|1万〜10万円比較
3Dプリンター選びは、方式より先に予算帯で現実的にできることと、最初から割り切るべきことを整理すると迷いません。この記事では1万円台、2〜3万円台、5〜7万円台、10万円前後の4区分で、Creality Ender-3やFLASHFORGE Finder、Adventurer3 lite、
ELEGOO比較|Mars・Saturn・Neptuneの選び方
ELEGOOの3択は、細密なミニチュア中心ならMars、大型フィギュアやパーツをまとめて出したいならSaturn、実用品や大物を気軽に回したいならNeptuneでほぼ決まります。